Autonomous Mobile Robots
System Architecture
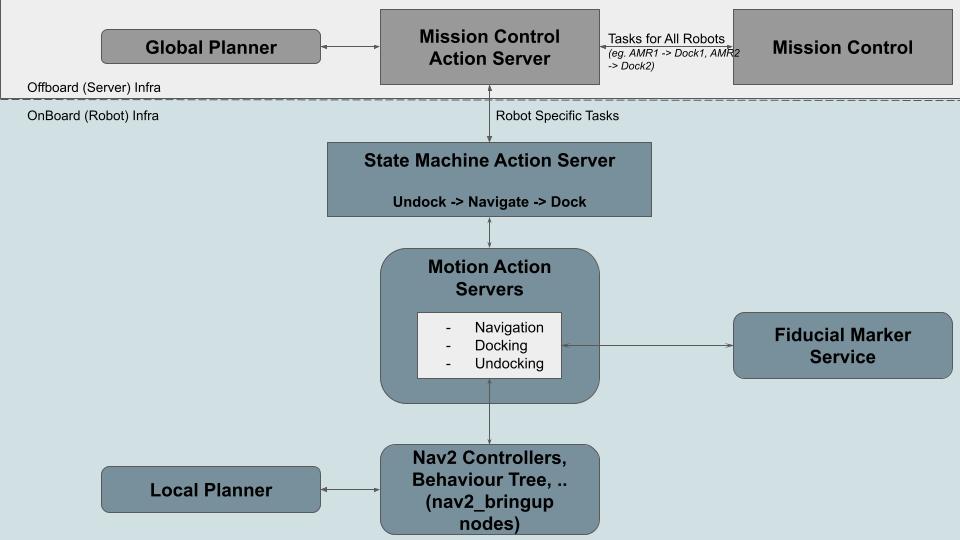
Below are relevant packages of the system:
Global Planner (
ddg_multi_robot_planner): Conflict-Based-Search (CBS) based ROS2 planner. It uses CBSH2-RTC mapf planner developed by Prof. Jiaoyang LiMission Control (
robot_mission_control): It launches a node to handle multiple AMRs and their higher-level commandsMotion Servers (
robot_motion_server): ROS2 action servers and client onboard robot to give navigation commands. There is a node for both navigation and docking/undockingLow Level Packages (
neo_*): These packages are originally provided by the manufacturer, Neobotix, and handle local navigation, localization and motion.
Simulation Environment
<TODO: insert simulation video/gif>
<TODO: describe packages to use for the simulation>
Integration with MES
The amr_fleet_offboard_infra_backend package receives the web request for the AMRs, and then communicates it over the ROS2 network.
The offboard_comms package handles the translated web request and sends it over to the mission control
The amr_fleet_offboard_infra_frontend is an alternative to MES sending web request for a task for the AMRs.
Other Resources
https://mrsd-project.herokuapp.com/ https://mrsdprojects.ri.cmu.edu/2023teamh/